一、引言
基于点的特征识别算法相对较少,刚好又需要对项目中的圆孔特征进行滤波,故采取点云密度+RANSAC对圆孔特征进行识别和滤波。
- 首先,根据采集点云的密度差异提取出包含圆孔特征,边界特征的点云集合;
- 然后,利用RANSAC进行圆孔拟合;
- 最后,获取拟合的圆孔的半径,圆心利用包围盒进行去除。
二、实现
2.1点云密度差异聚类
计算点云数据的点密度差异,提取出密度差异的特征点云,并进行欧式聚类,具体实现见点云计算点密度特征 | Sifanのblog (liangzhouzz.github.io)
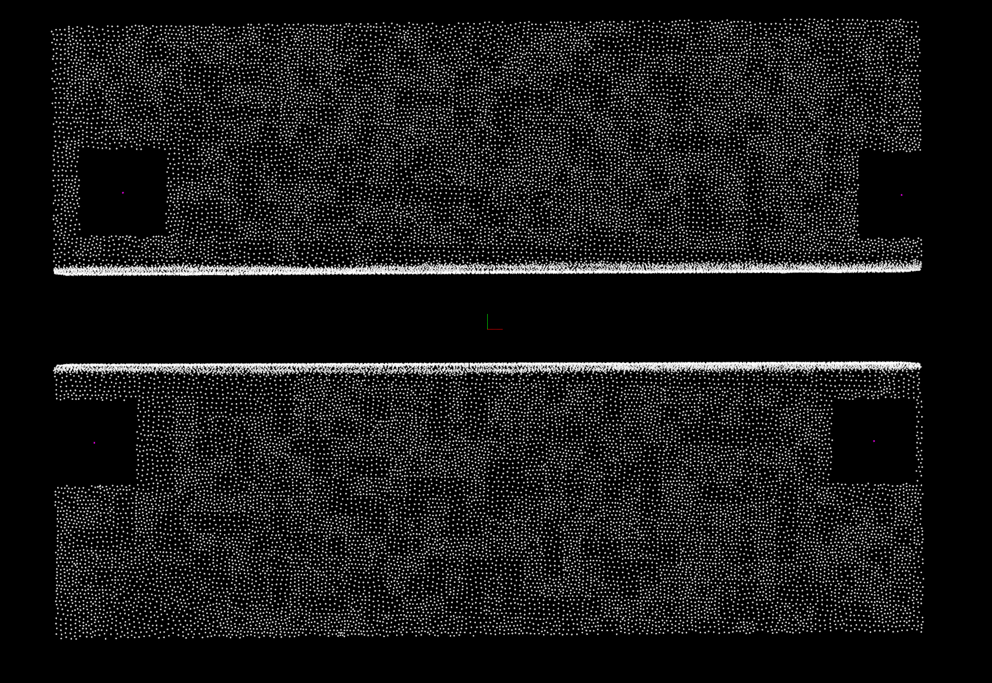
原始图像
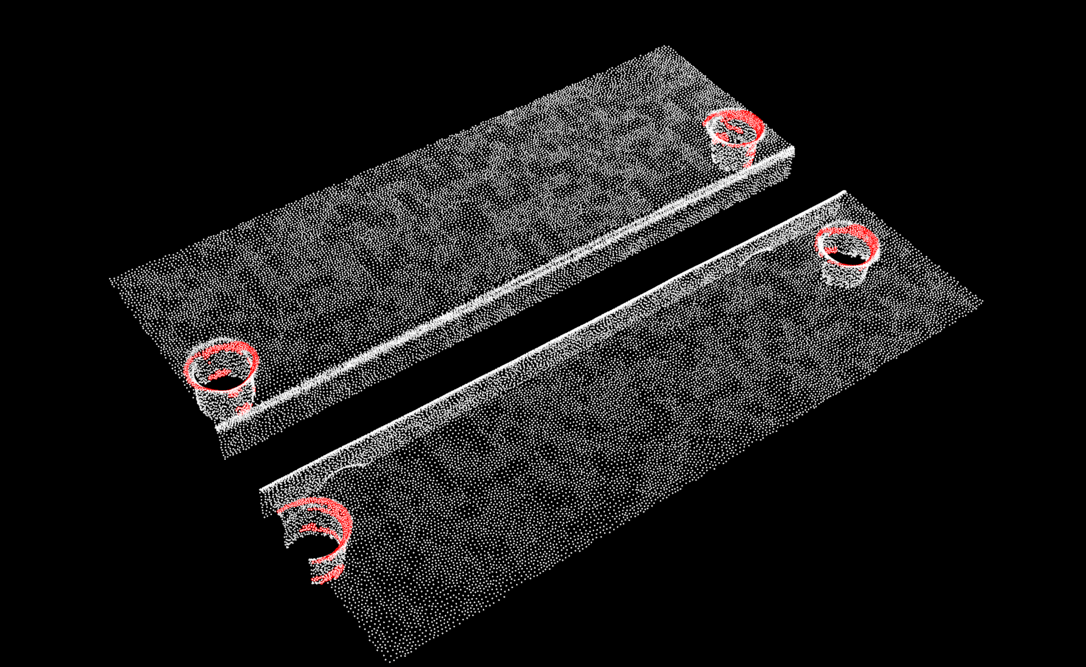
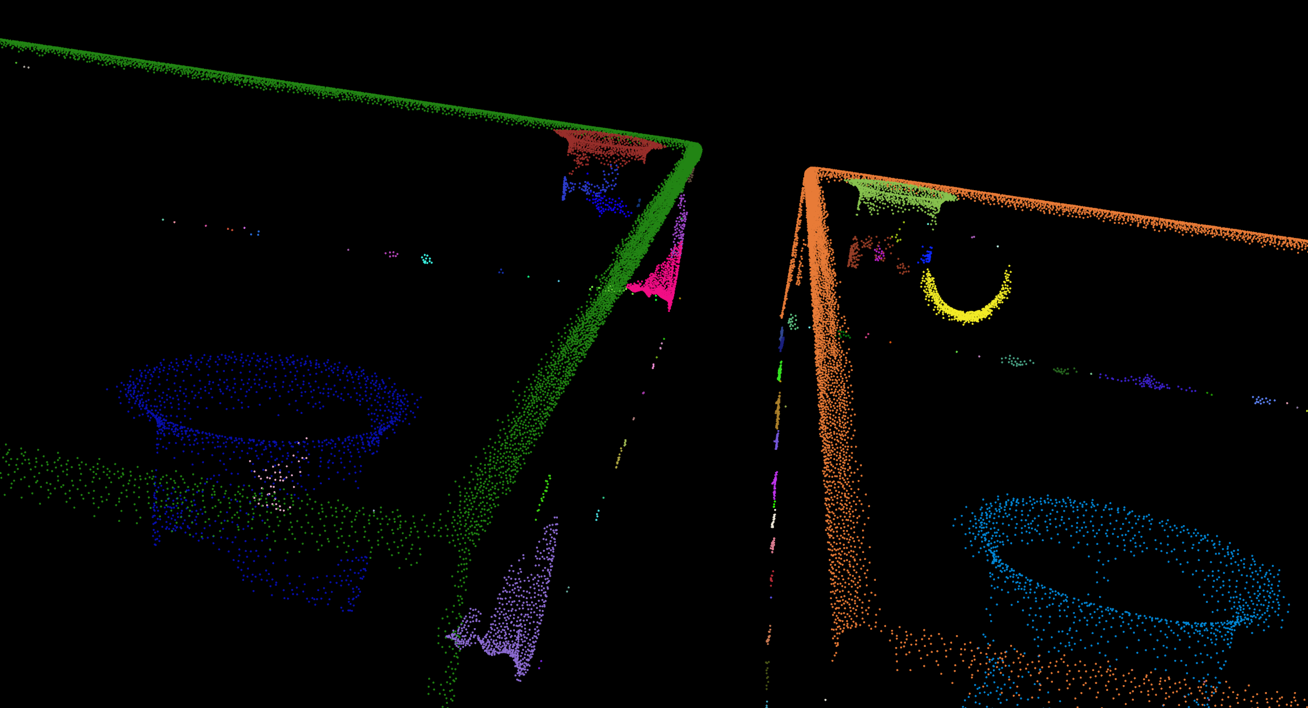
提取后的图像:
2.2点云聚类
将经过密度提取后的点云进行聚类,代码如下:
1
2
3
4
5
6
7
8
9
10
11
| pcl::search::KdTree<pcl::PointXYZ>::Ptr kd_tree(new pcl::search::KdTree<pcl::PointXYZ>);
kd_tree->setInputCloud(cloud);
std::vector<pcl::PointIndices>cluster_indices;
pcl::EuclideanClusterExtraction<pcl::PointXYZ>ec;
ec.setClusterTolerance(0.2);
ec.setMinClusterSize(20);
ec.setMaxClusterSize(cloud->size());
ec.setSearchMethod(kd_tree);
ec.setInputCloud(cloud);
ec.extract(cluster_indices);
|
2.3RANSAC拟合圆
RANSAC拟合圆,可选择拟合2D圆pcl::SACMODEL_CIRCLE2D或3D圆pcl::SACMODEL_CIRCLE3D,这里选择用3D,RANSAC需传入法向量,对点云进行法向量估计。RANSAC会存在拟合错误的情况,需要对拟合出圆的半径进行限制,限制在其范围内找到目标圆。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
|
pcl::SACSegmentationFromNormals<pcl::PointXYZ,pcl::Normal>seg;
pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients);
pcl::PointIndices::Ptr inliers (new pcl::PointIndices);
std::vector<pcl::ModelCoefficients>coeff;
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud(cluster);
ne.setSearchMethod(tree);
ne.setRadiusSearch(0.01);
ne.compute(*normals);
seg.setOptimizeCoefficients(true);
seg.setModelType(pcl::SACMODEL_CIRCLE3D);
seg.setMethodType(pcl::SAC_RANSAC);
seg.setNormalDistanceWeight(0.9);
seg.setMaxIterations(10000);
seg.setDistanceThreshold(0.1);
seg.setRadiusLimits(1.5,3);
seg.setInputNormals(normals);
seg.setInputCloud(cluster);
seg.segment(*inliers,*coefficients);
|
2.4包围盒分割
根据提取出圆的索引,可以得到其圆心坐标和半径,然后利用最小包围盒进行分割。
拟合出3D圆的参数如下:
圆心坐标x:value[0]圆心坐标y:value[1]圆心坐标z:value[2]半径r:value[3]法向量nx:value[4]法向量ny:value[5]法向量nz:value[6]
设置包围盒的最小点坐标min_pt,和最大点坐标max_pt,然后创建包围盒对象,得到在包围盒内的点云索引。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
| for (size_t i = 0; i < coeff.size(); i++)
{
Eigen::Vector3f center(coeff.at(i).values[0],coeff.at(i).values[1],coeff.at(i).values[2]);
float length0 = fabs(coeff.at(i).values[3])+0.3,width0 = fabs(coeff.at(i).values[3])+0.3, height0 = 5.0;
Eigen::Vector4f min_pt(center.x()-(length0),center.y()-(width0),center.z()-(height0),0);
Eigen::Vector4f max_pt(center.x()+(length0),center.y()+(width0),center.z()+(height0),0);
pcl::CropBox<pcl::PointXYZ>crop;
crop.setMin(min_pt);
crop.setMax(max_pt);
crop.setInputCloud(cloud);
crop.setKeepOrganized(false);
crop.setUserFilterValue(0.1f);
pcl::IndicesPtr indexes(new std::vector<int>);
crop.filter(*indexes);
pcl::ExtractIndices<pcl::PointXYZ>extract;
extract.setInputCloud(cloud);
extract.setIndices(indexes);
extract.setNegative(true);
extract.filter(*cloud);
}
|
2.5代码实现
代码汇总:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
|
#include<pcl/sample_consensus/sac_model_circle3d.h>
#include<pcl/segmentation/extract_clusters.h>
#include<pcl/filters/crop_box.h>
#include<pcl/segmentation/sac_segmentation.h>
#include<pcl/filters/extract_indices.h>
void ExtractCircle(const pcl::PointCloud<pcl::PointXYZ>::Ptr &cloud)
{
pcl::search::KdTree<pcl::PointXYZ>::Ptr kd_tree(new pcl::search::KdTree<pcl::PointXYZ>);
kd_tree->setInputCloud(cloud);
std::vector<pcl::PointIndices>cluster_indices;
pcl::EuclideanClusterExtraction<pcl::PointXYZ>ec;
ec.setClusterTolerance(0.2);
ec.setMinClusterSize(20);
ec.setMaxClusterSize(cloud->size());
ec.setSearchMethod(kd_tree);
ec.setInputCloud(cloud);
ec.extract(cluster_indices);
pcl::SACSegmentationFromNormals<pcl::PointXYZ,pcl::Normal>seg;
pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients);
pcl::PointIndices::Ptr inliers (new pcl::PointIndices);
std::vector<pcl::ModelCoefficients>coeff;
int counti=0;
for (const auto & indices : cluster_indices)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cluster(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_cir(new pcl::PointCloud<pcl::PointXYZ>);
pcl::copyPointCloud(*cloud,indices.indices,*cluster);
pcl::PointCloud<pcl::Normal>::Ptr normals (new pcl::PointCloud<pcl::Normal>);
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud(cluster);
ne.setSearchMethod(tree);
ne.setRadiusSearch(0.01);
ne.compute(*normals);
seg.setOptimizeCoefficients(true);
seg.setModelType(pcl::SACMODEL_CIRCLE3D);
seg.setMethodType(pcl::SAC_RANSAC);
seg.setNormalDistanceWeight(0.9);
seg.setMaxIterations(10000);
seg.setDistanceThreshold(0.1);
seg.setRadiusLimits(1.5,3);
seg.setInputNormals(normals);
seg.setInputCloud(cluster);
seg.segment(*inliers,*coefficients);
if (inliers->indices.size() < 80)
{
continue;
}
coeff.push_back(*coefficients);
counti++;
pcl::ExtractIndices<pcl::PointXYZ> extract;
extract.setInputCloud(cluster);
extract.setIndices(inliers);
extract.setNegative(false);
extract.filter(*cloud_cir);
}
for (size_t i = 0; i < coeff.size(); i++)
{
Eigen::Vector3f center(coeff.at(i).values[0],coeff.at(i).values[1],coeff.at(i).values[2]);
float length0 = fabs(coeff.at(i).values[3])+0.3,width0 = fabs(coeff.at(i).values[3])+0.3, height0 = 5.0;
Eigen::Vector4f min_pt(center.x()-(length0),center.y()-(width0),center.z()-(height0),0);
Eigen::Vector4f max_pt(center.x()+(length0),center.y()+(width0),center.z()+(height0),0);
pcl::CropBox<pcl::PointXYZ>crop;
crop.setMin(min_pt);
crop.setMax(max_pt);
crop.setInputCloud(cloud);
crop.setKeepOrganized(false);
crop.setUserFilterValue(0.1f);
pcl::IndicesPtr indexes(new std::vector<int>);
crop.filter(*indexes);
pcl::ExtractIndices<pcl::PointXYZ>extract;
extract.setInputCloud(cloud);
extract.setIndices(indexes);
extract.setNegative(true);
extract.filter(*cloud);
}
}
|
2.6结果
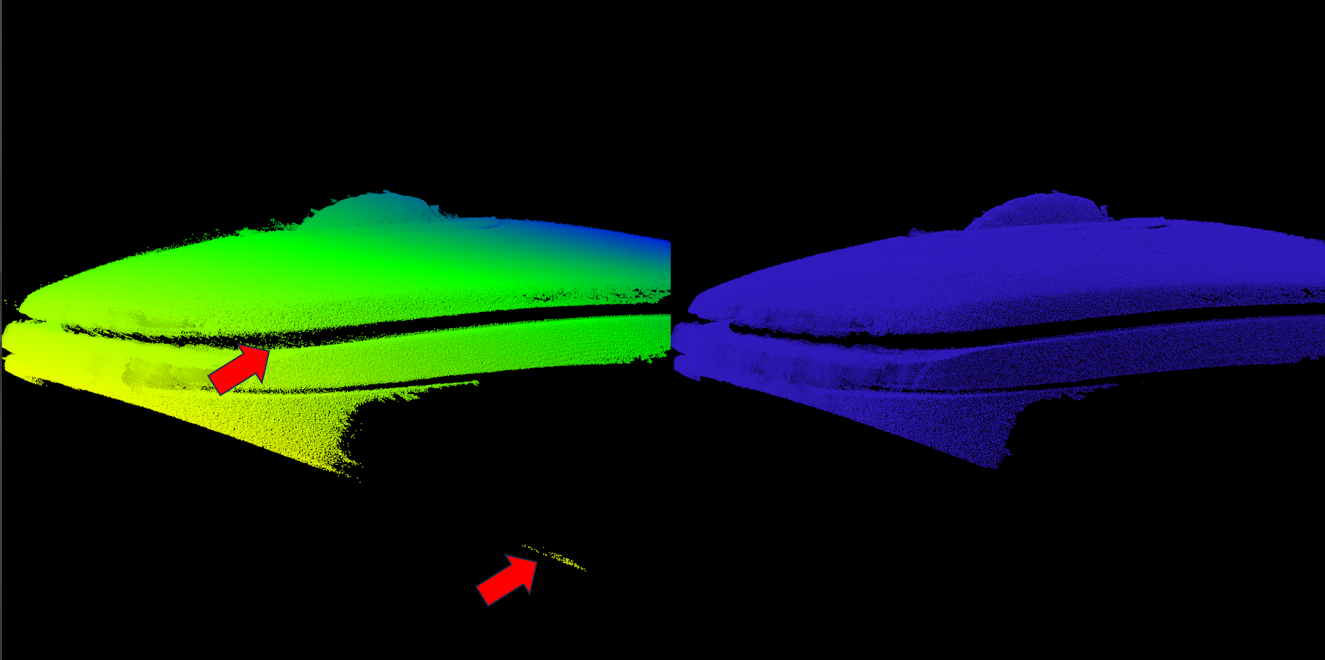
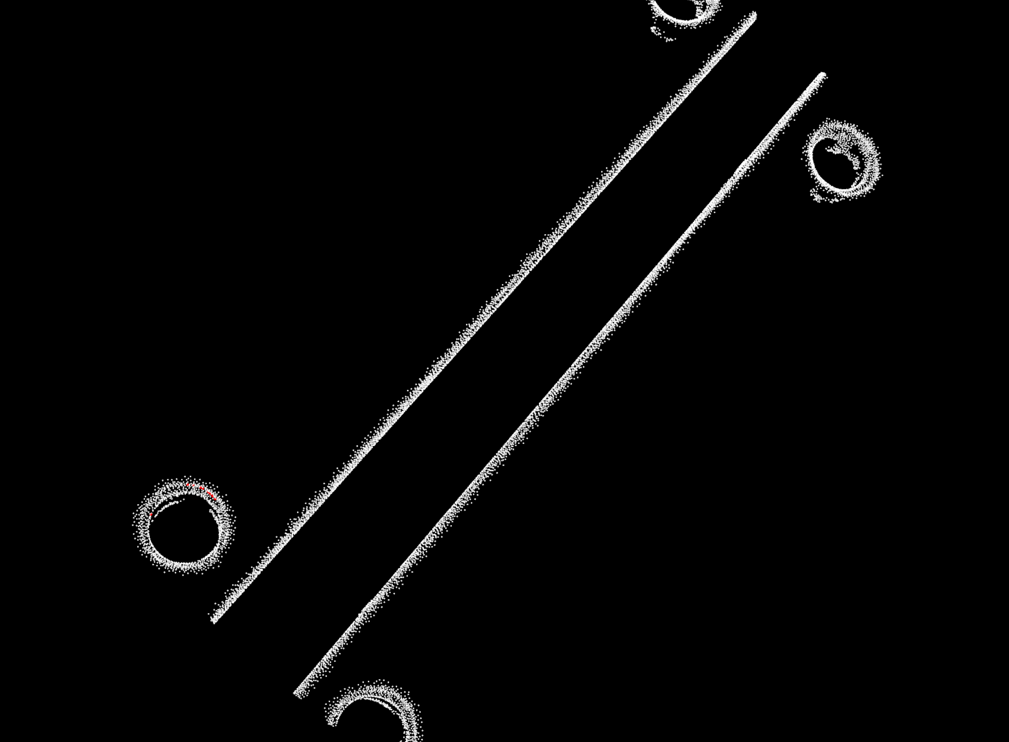
RANSAC搜索的对象
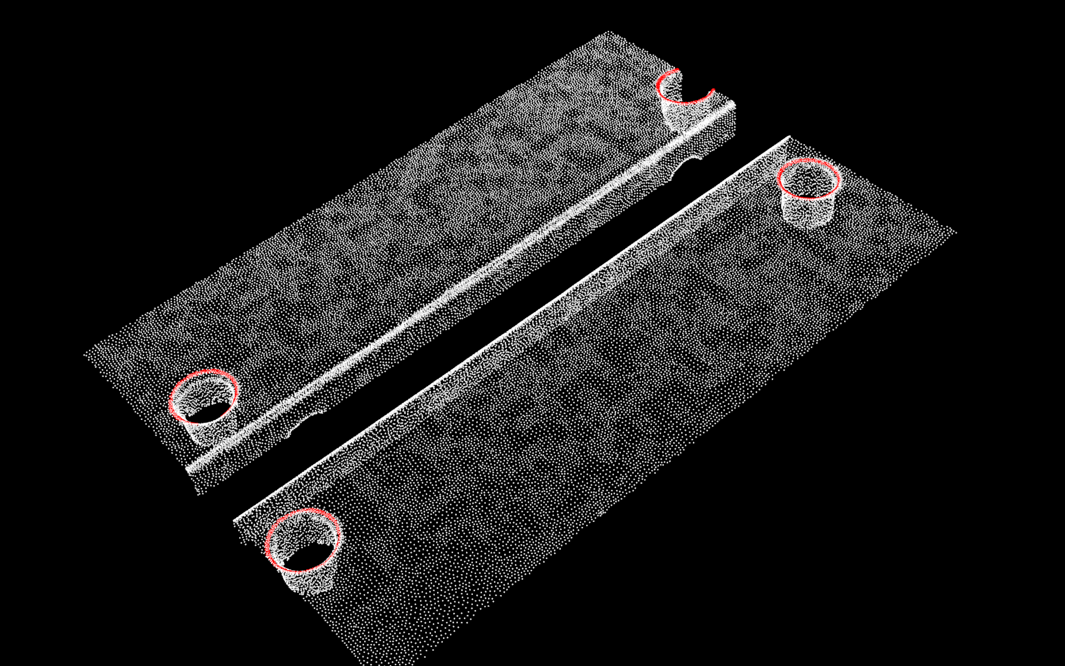
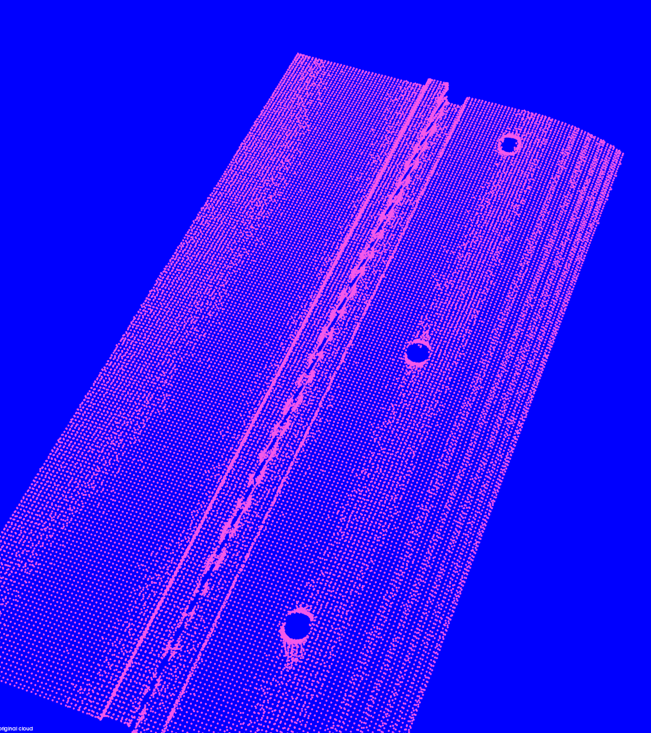
包围盒分割图像