一、引言
在降采样中想要充分保留边界信息,但是采用体素降采样,均匀降采样等,都是对全局的点云信息进行降采样,无法做到分区域的降采样。因此对点云的曲率进行估计,作为额外的补充信息对点云进行降采样。即对点云做条件滤波。曲率信息作为滤波条件。
运行环境:Ubuntu18.04 + PCL1.11
二、实现
主要步骤如下:
- 估计点云的法向量和曲率
- 对点云法向量和曲率进行字段连接
- 根据曲率大小进行分区域降采样
2.1估计点云的法向量和曲率
利用PCL库对点云的法向量和曲率进行估计。要注意根据实际的情况设置合适的点云邻域半径。
1
2
3
4
5
6
7
8
9
10
| pcl::NormalEstimationOMP<pcl::PointXYZ,pcl::Normal>n;
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
tree->setInputCloud(cloud);
n.setViewPoint(10,10,10);
n.setInputCloud(cloud);
n.setNumberOfThreads(4);
n.setSearchMethod(tree);
n.setRadiusSearch(1);
n.compute(*normals);
|
2.2字段连接
利用concatenateFields将点云的法向量与曲率信息连接。
1
2
| pcl::PointCloud<pcl::PointNormal>::Ptr cnormals(new pcl::PointCloud<pcl::PointNormal>);
pcl::concatenateFields(*cloud,*normals,*cnormals);
|
2.3分区域滤波
设置合理的曲率阈值cur_threshold,遍历点云,将点云放入不同的点云集合clouddownsample_1和clouddownsample_2,分别设置不同的降采样尺度。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
| pcl::PointCloud<pcl::PointXYZ>::Ptr clouddownsample_1(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr clouddownsample_2(new pcl::PointCloud<pcl::PointXYZ>);
for (size_t i = 0; i < cnormals->points.size(); i++){
if (cnormals->at(i).curvature > cur_threshold){
clouddownsample_1->points.emplace_back(cloud->points[i]);
}else{
clouddownsample_2->points.emplace_back(cloud->points[i]);
}
}
clouddownsample_1->width = clouddownsample_1->points.size();
clouddownsample_1->height = 1;
clouddownsample_1->is_dense = true;
clouddownsample_2->width = clouddownsample_2->points.size();
clouddownsample_2->height = 1;
clouddownsample_2->is_dense = true;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_add(new pcl::PointCloud<pcl::PointXYZ>);
float leftSize = 0.25f;
pcl::VoxelGrid<pcl::PointXYZ> down;
down.setInputCloud (clouddownsample_2);
down.setLeafSize (leftSize, leftSize, leftSize);
down.filter (*clouddownsample_2);
*cloud_add = *clouddownsample_1 + *clouddownsample_2;
|
三、结果
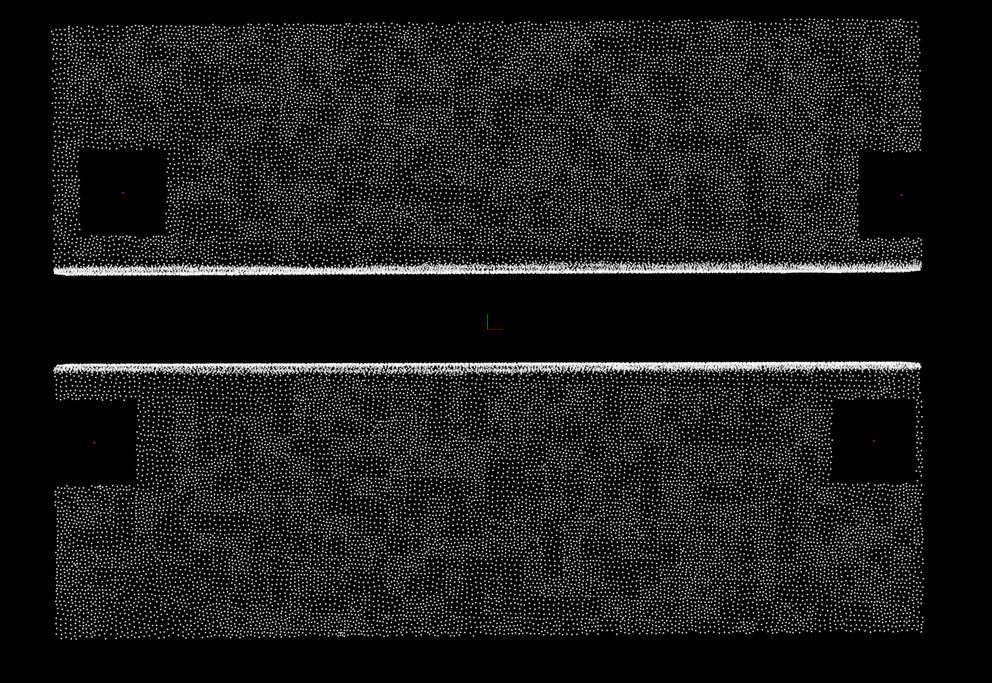
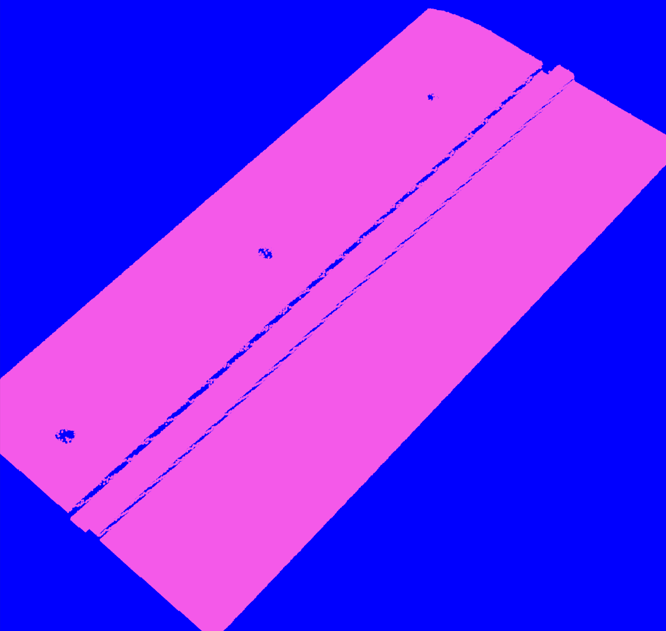
3.1原始图像
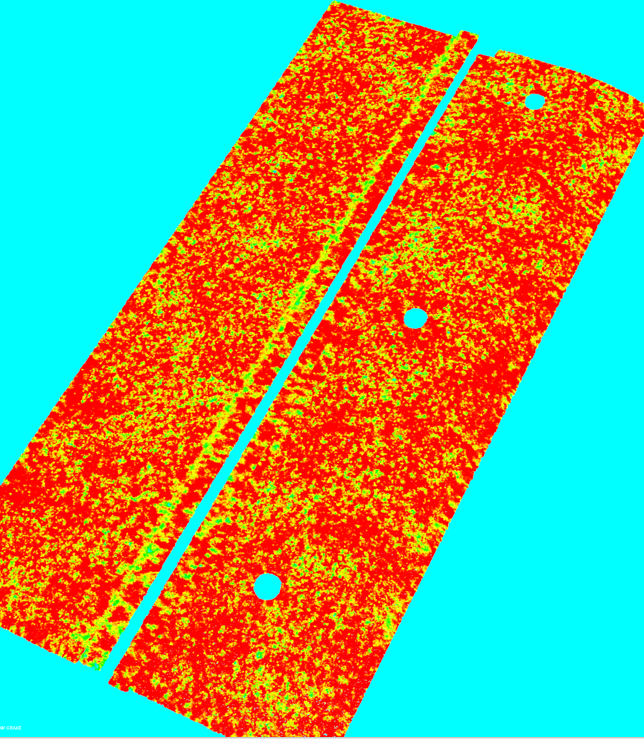
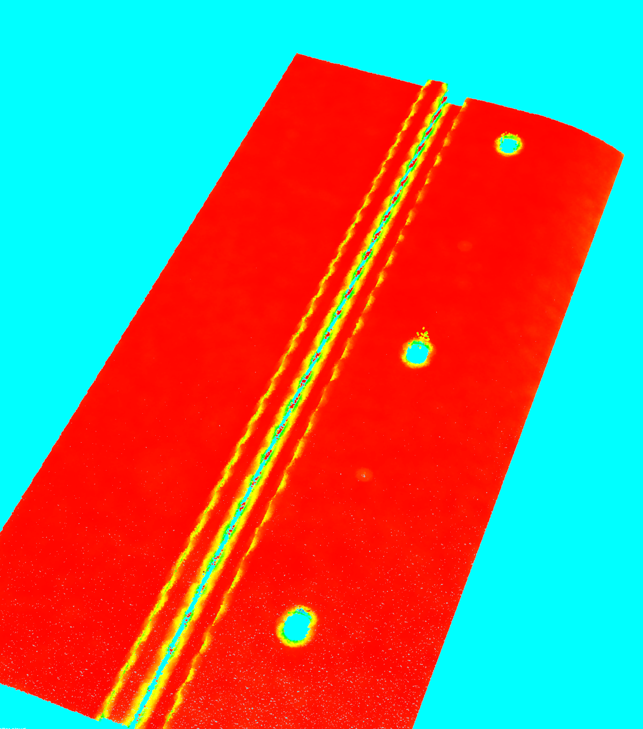
3.2曲率估计图像
曲率高的地方为边界。
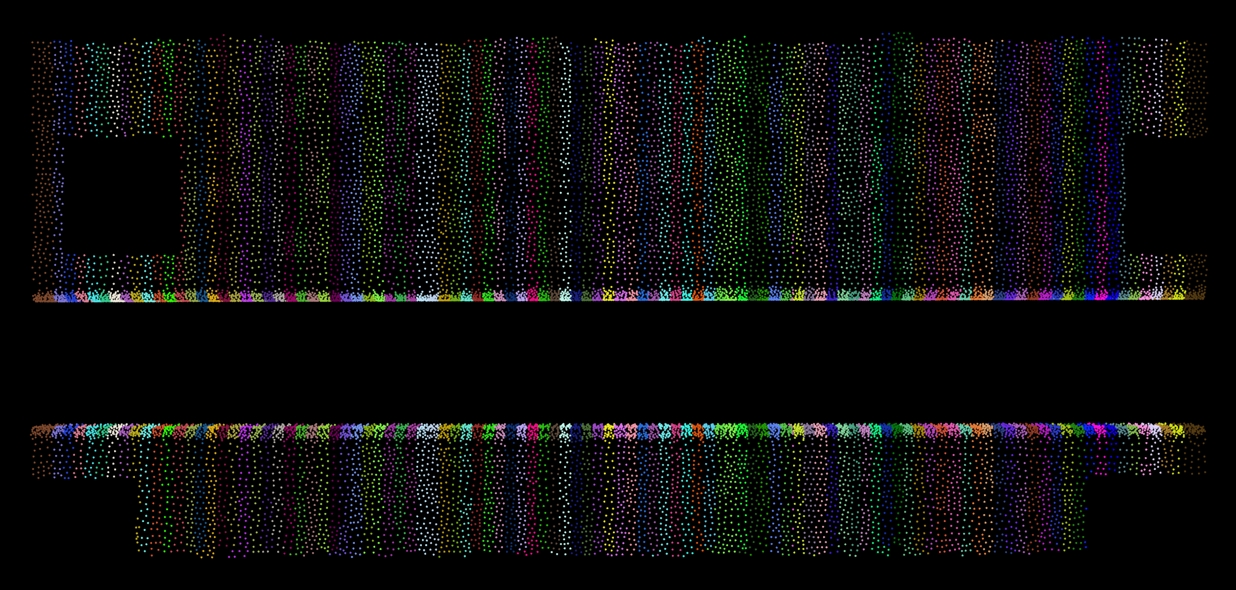
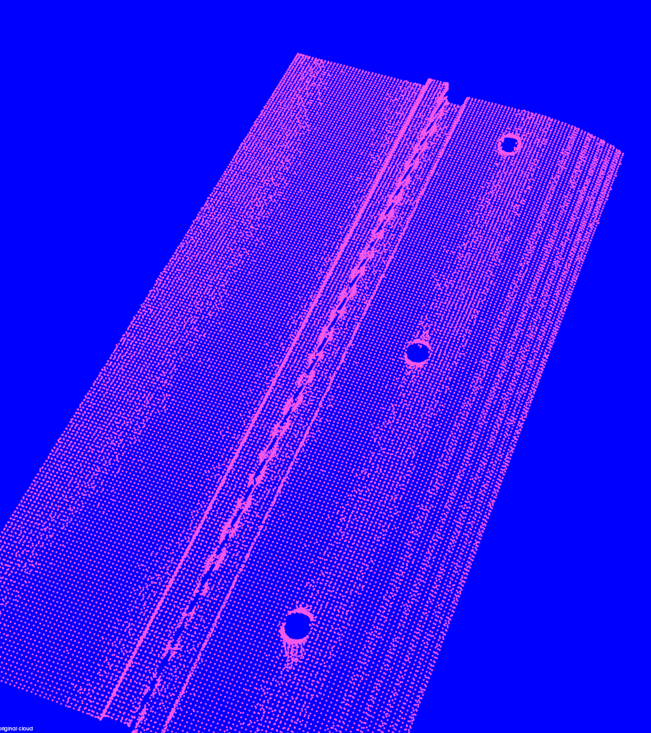
3.3降采样图像
边界信息较好的保留了下来
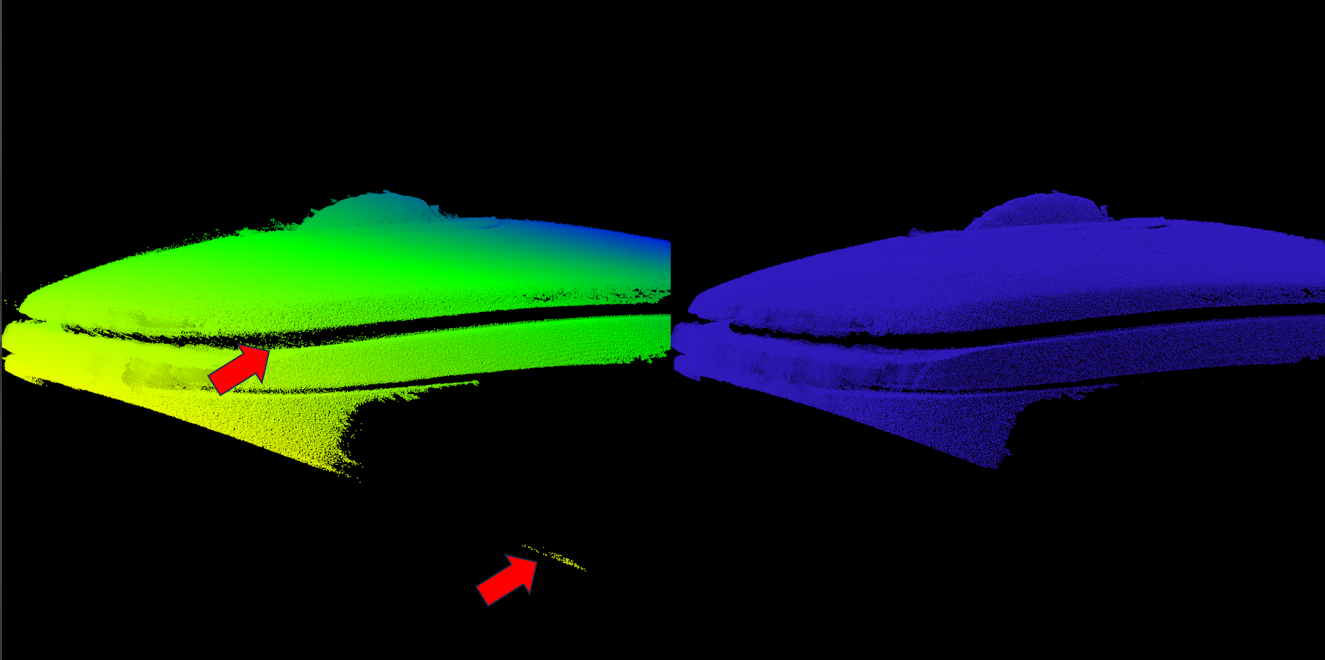
3.4不足
整体对曲率估计时的邻域半径设置比较敏感,若设置过小,极易受到噪声点的干扰,如下图的曲率估计。