对缝融合特征提取
一、引言
出发点:
- 在对缝的间隙和阶差的测量过程,对缝结构的正确,完整提取是非常重要的。
- 实际的点云采集过程中,易受到环境光照条件,以及被测量物体的表面反光条件的影响,点云的密度分布是不规律的,会收到光环境的影响,不再是传统意义上的在边界部分,或者拐角部分的密度大,密度差异不一致 —— 对缝结构采取 密度差异提取不可行。
- 融合曲率与边界特征提取,能极大的提高特征提取算法的鲁棒性。
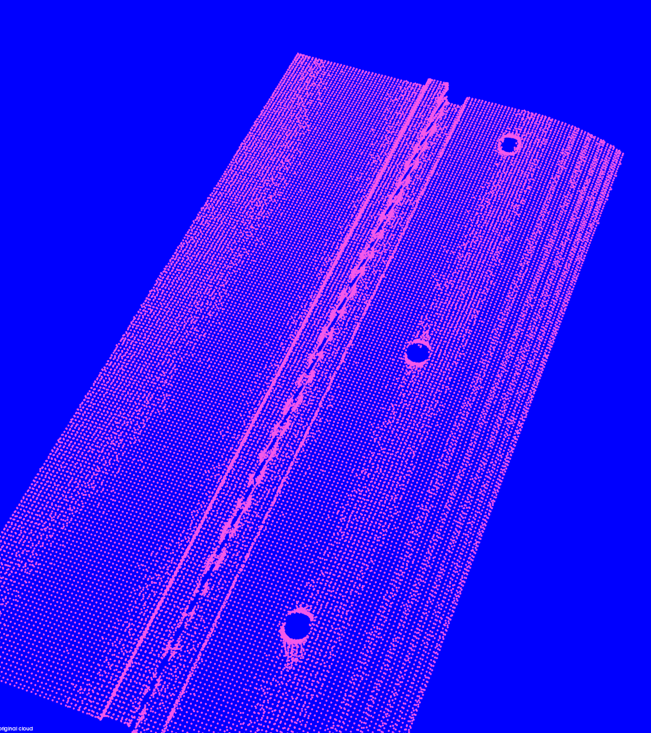
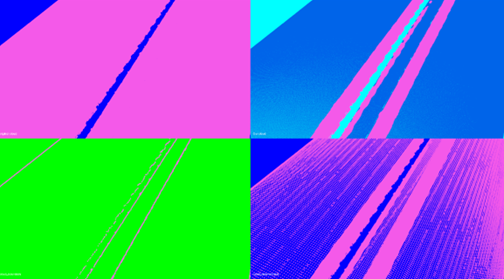
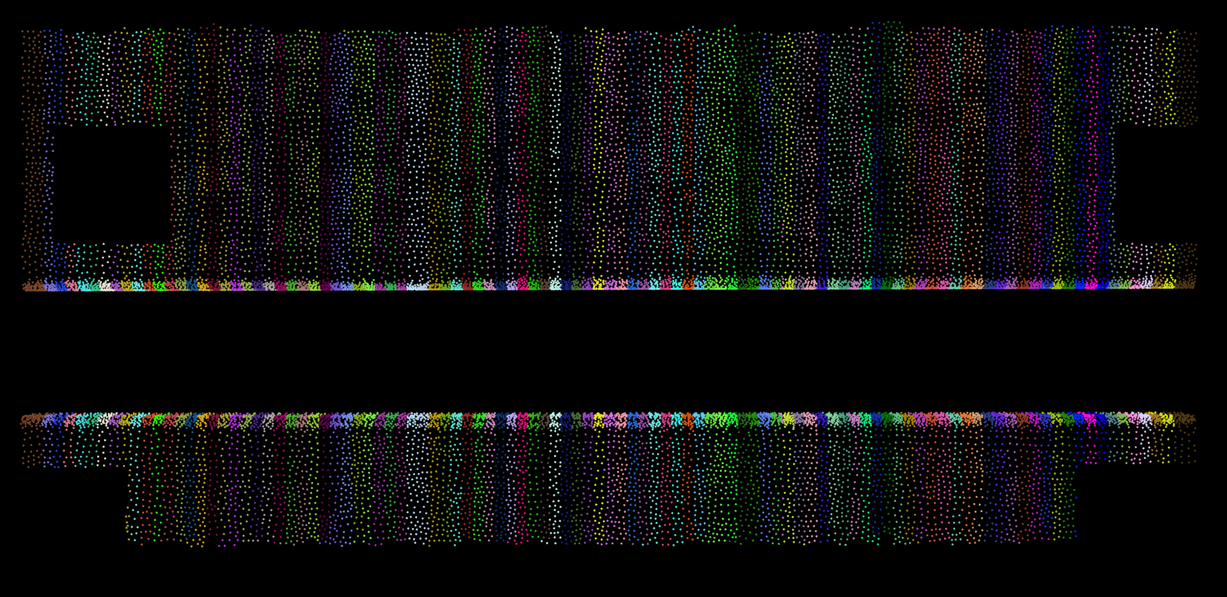
如下图:点云的密度分布不均匀,采用密度分割 无法将特征提取。
因此提出曲率边界融合特征提取:
- 点云的曲率特征能够很大程度上的保留关键特征信息
- 点云的边界特征能够保留轮廓的信息
二、实现
曲率估计
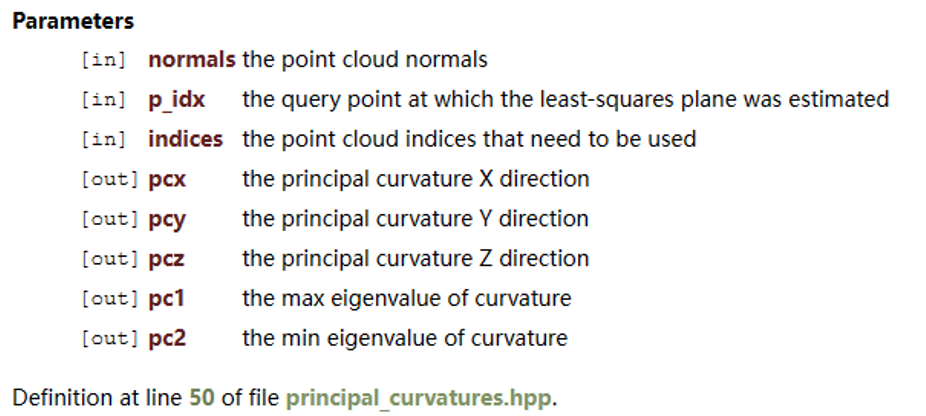
PCL中的曲率有两个 一个是 NormalEstimation中的曲率 ,另一个是PrincipalCurvaturesEstimation .
- 前者表示是表面曲率,即表示表面的起伏程度;
- 后者见下图,曲率估计出来有两个值,一个最大,一个最小曲率—>即可求平均曲率
1 | // 计算 |
边界计算
参考文献:Bendels G H , Schnabel R , Klein R .Detecting Holes in Point Set Surfaces[J].Journal of WSCG, 2006, 14.
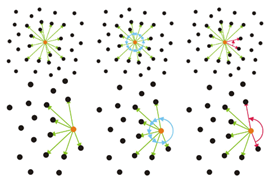
边界计算采用BoundaryEstimation,其原理即:
- 搜索每个点的邻域信息,建立点 到其邻域点的连线
- 统计每两个连线之间的夹角值,
- 超过给定的阈值即为边界点
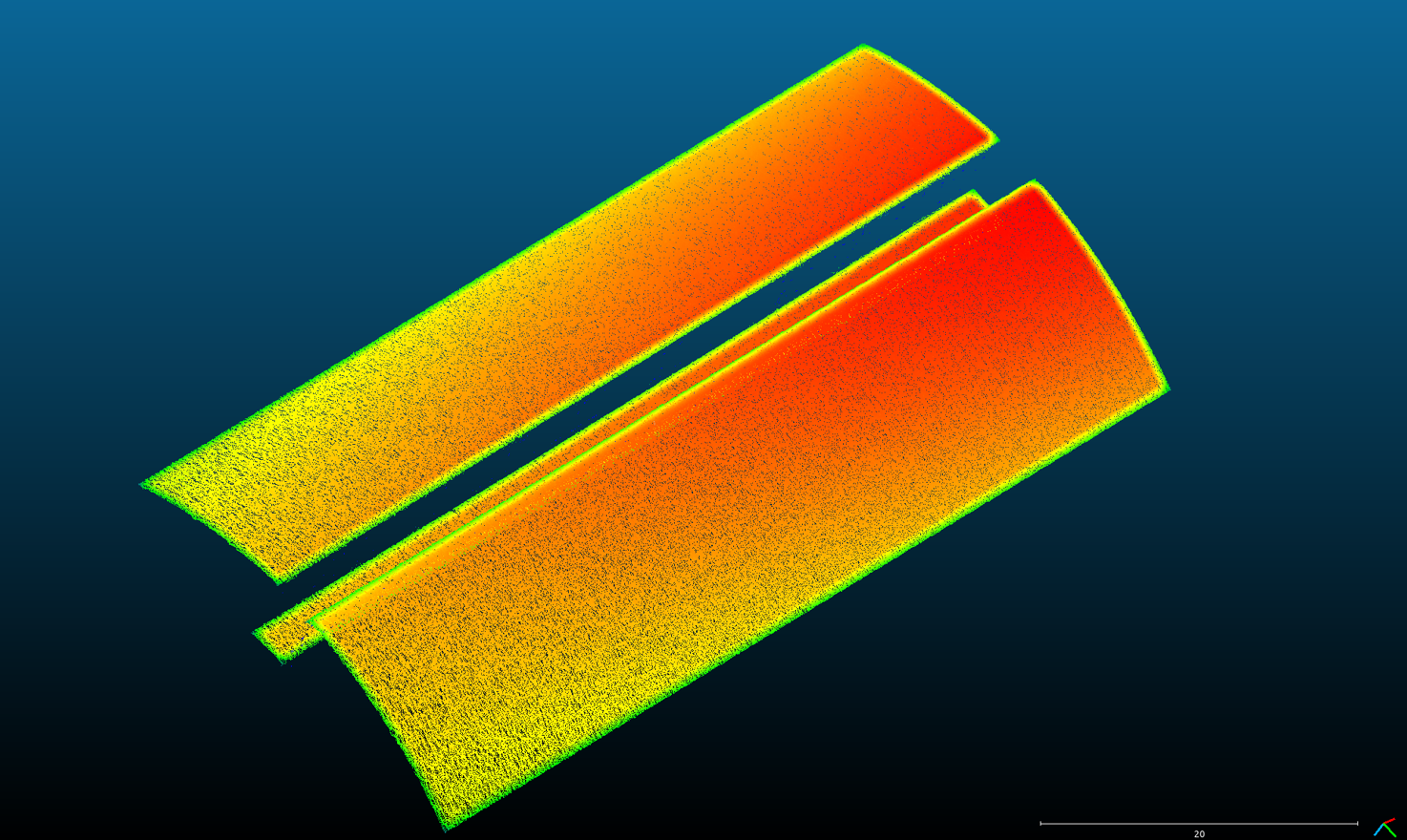
三、结果
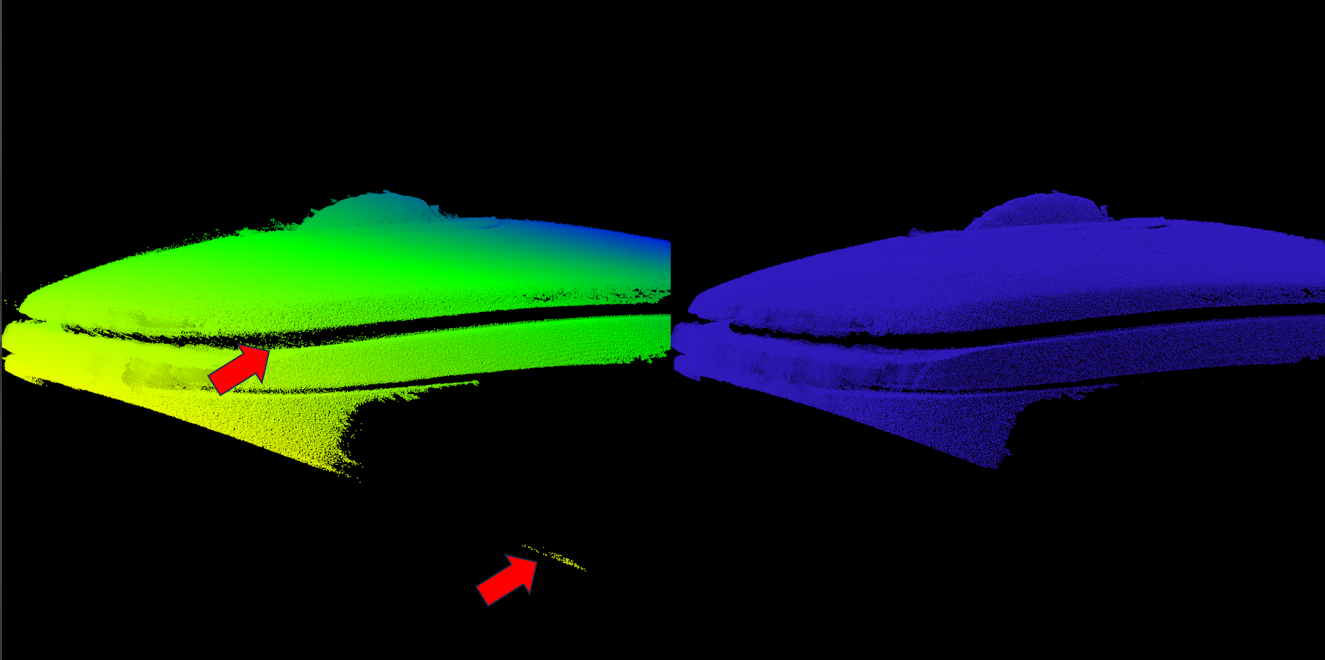
曲面的对缝:
平面的对缝:
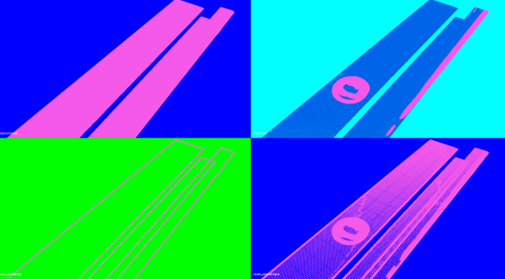
均能提取出对缝特征,并且在划分测量小区间方面,融合特征算法也表现不错。划分的区间数量稳定。
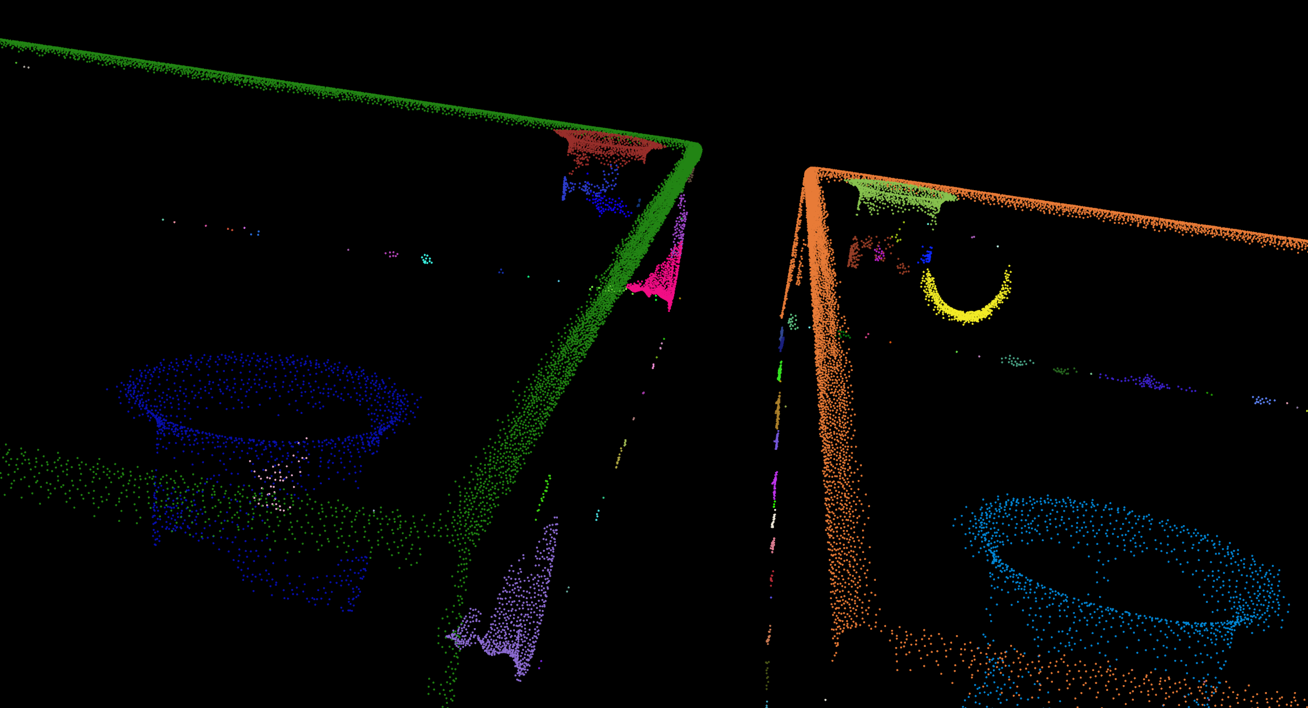
区间划分示意图:
平面:
| 平面 | |||
|---|---|---|---|
| 融合 (个) | 仅曲率 | 仅边界 | |
| 1 | 57 | 57 | 59 |
| 0.9 | 57 | 57 | 57 |
| 0.8 | 58 | 58 | 58 |
| 0.7 | 57 | 57 | 57 |
| 0.6 | 55 | 55 | 56 |
| 0.5 | 55 | 55 | 60 |
| 0.4 | 57 | 57 | 59 |
| 0.3 | 55 | 55 | 57 |
| 0.2 | 57 | 57 | 44 |
| 0.1 | 57 | 57 | 47 |
| 0.075 | 57 | 57 | 57 |
| 0.050 | 56 | 56 | 56 |
| 0.025 | 56 | 10 | 56 |
| 0.000 | 61 | 0 | 61 |
曲面:
| 斜面 | |||
|---|---|---|---|
| 融合 | 曲率 | 边界 | |
| 1 | 77 | 77 | 73 |
| 0.9 | 77 | 77 | 70 |
| 0.8 | 78 | 78 | 73 |
| 0.7 | 78 | 78 | 72 |
| 0.6 | 76 | 76 | 71 |
| 0.5 | 76 | 76 | 73 |
| 0.4 | 76 | 76 | 47 |
| 0.3 | 76 | 76 | 47 |
| 0.2 | 72 | 72 | 30 |
| 0.1 | 74 | 74 | 47 |
| 0.075 | 69 | 70 | 28 |
| 0.050 | 76 | 19 | 72 |
| 0.025 | 76 | 6 | 76 |
| 0.000 | 76 | 0 | 76 |
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Sifanのblog!